|
| virtual void | FindPath (const Vector &start, const Vector &end, const PathSearchParameter ¶meters)=0 |
| | Find and set the path from start to end.
|
| virtual void | FindPathNear (const Vector &start, const Vector &end, float radius, const PathSearchParameter ¶meters)=0 |
| | Find and set the path from start to end with the specified goal radius.
|
| virtual void | FindPathAway (const Vector &start, const Vector &avoid, const Vector &preferredDir, float radius, const PathSearchParameter ¶meters)=0 |
| | Find and set the path away from the specified origin.
|
| virtual bool | TestPath (const Vector &start, const Vector &end, const PathSearchParameter ¶meters)=0 |
| | Returns true if the path exists, false otherwise.
|
| virtual void | UpdatePos (const Vector &origin)=0 |
| | Update path movement.
|
| virtual void | Clear ()=0 |
| | Clear the path.
|
| virtual PathNav | GetNode (unsigned int index=0) const =0 |
| | Return the node at the specified index (0 = first node, and nodecount - 1 = last node).
|
| virtual int | GetNodeCount () const =0 |
| | Return the number of nodes.
|
| virtual Vector | GetCurrentDelta () const =0 |
| | Return the current move delta.
|
| virtual Vector | GetCurrentDirection () const =0 |
| | Return the directional vector towards the path.
|
| virtual Vector | GetDestination () const =0 |
| | Return the final destination.
|
| virtual bool | HasReachedGoal (const Vector &origin) const =0 |
| | Return true if the origin is at the end of the goal.
|
| virtual bool | IsQuerying () const =0 |
| | Return true if the path is currently being calculated.
|
|
| static IPather * | CreatePather () |
| | Create a new Pather object based on supported navigation features.
|
◆ Clear()
| virtual void IPather::Clear |
( |
| ) |
|
|
pure virtual |
◆ CreatePather()
| IPather * IPather::CreatePather |
( |
| ) |
|
|
static |
Create a new Pather object based on supported navigation features.
- Returns
- IPather*
◆ FindPath()
| virtual void IPather::FindPath |
( |
const Vector & | start, |
|
|
const Vector & | end, |
|
|
const PathSearchParameter & | parameters ) |
|
pure virtual |
Find and set the path from start to end.
- Parameters
-
| start | Start of the path. |
| end | End of the path |
| parameters | |
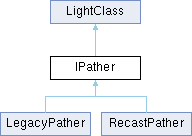
Implemented in LegacyPather, and RecastPather.
◆ FindPathAway()
| virtual void IPather::FindPathAway |
( |
const Vector & | start, |
|
|
const Vector & | avoid, |
|
|
const Vector & | preferredDir, |
|
|
float | radius, |
|
|
const PathSearchParameter & | parameters ) |
|
pure virtual |
Find and set the path away from the specified origin.
- Parameters
-
| start | Start of the path |
| avoid | Location to avoid |
| preferredDir | Preferred direction to use to escape from the location to avoid |
| radius | Minimum safe distance to avoid |
| parameters | |
Implemented in LegacyPather, and RecastPather.
◆ FindPathNear()
| virtual void IPather::FindPathNear |
( |
const Vector & | start, |
|
|
const Vector & | end, |
|
|
float | radius, |
|
|
const PathSearchParameter & | parameters ) |
|
pure virtual |
Find and set the path from start to end with the specified goal radius.
- Parameters
-
| start | Start of the path |
| end | End of the path |
| radius | The radius at which to stop the path |
| parameters | |
Implemented in LegacyPather, and RecastPather.
◆ GetCurrentDelta()
| virtual Vector IPather::GetCurrentDelta |
( |
| ) |
const |
|
pure virtual |
Return the current move delta.
- Returns
- Vector with the current move delta.
Implemented in LegacyPather, and RecastPather.
◆ GetCurrentDirection()
| virtual Vector IPather::GetCurrentDirection |
( |
| ) |
const |
|
pure virtual |
Return the directional vector towards the path.
- Returns
- Vector with the current directional vector.
Implemented in LegacyPather, and RecastPather.
◆ GetDestination()
| virtual Vector IPather::GetDestination |
( |
| ) |
const |
|
pure virtual |
◆ GetNode()
| virtual PathNav IPather::GetNode |
( |
unsigned int | index = 0 | ) |
const |
|
pure virtual |
Return the node at the specified index (0 = first node, and nodecount - 1 = last node).
- Parameters
-
- Returns
- A copy of the path information.
Implemented in LegacyPather, and RecastPather.
◆ GetNodeCount()
| virtual int IPather::GetNodeCount |
( |
| ) |
const |
|
pure virtual |
Return the number of nodes.
- Returns
- The number of nodes. If 0, then there is no path.
Implemented in LegacyPather, and RecastPather.
◆ HasReachedGoal()
| virtual bool IPather::HasReachedGoal |
( |
const Vector & | origin | ) |
const |
|
pure virtual |
Return true if the origin is at the end of the goal.
- Parameters
-
| origin | The current origin to test |
Implemented in LegacyPather, and RecastPather.
◆ IsQuerying()
| virtual bool IPather::IsQuerying |
( |
| ) |
const |
|
pure virtual |
◆ TestPath()
| virtual bool IPather::TestPath |
( |
const Vector & | start, |
|
|
const Vector & | end, |
|
|
const PathSearchParameter & | parameters ) |
|
pure virtual |
Returns true if the path exists, false otherwise.
- Parameters
-
| start | Start of the path. |
| end | End of the path |
| parameters | |
- Returns
- true if the path exists
Implemented in LegacyPather, and RecastPather.
◆ UpdatePos()
| virtual void IPather::UpdatePos |
( |
const Vector & | origin | ) |
|
|
pure virtual |
The documentation for this class was generated from the following files: